
USAL Autonomous Underwater Vehicle
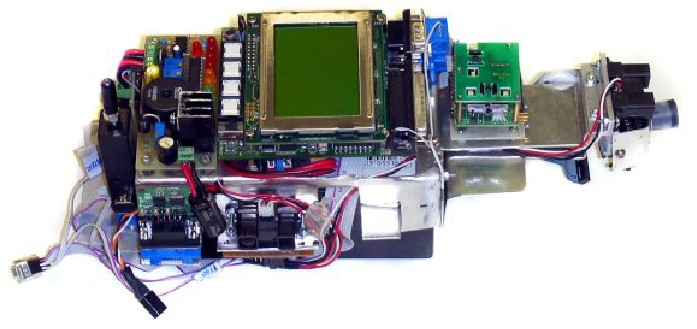
Project USAL is the second autonomous submarine we built in the Mobile Robot Lab at The University of Western Australia. The shell of an USAL ROV (remotely operated vehicle) has been used as the basis for this design. The ROV has been stripped by its electronics and umbilical cord, and an EyeBot controller with infrared sensors and a digital camera have been used as substitutes. This project commenced in 2005 and sought to begin development on mechanical, control, sonar, navigation, vision and communication systems for the vehicle. The 2005 team consisted of international visitors and final year students, Bernhard Gerl, Michael Drtil, and Aaron Cha, supervised by Thomas Braunl.
Thomas Bräunl, 2006