EyeTrack
The EyeTrack vehicle is a modified model car using tracks for locomotion.
We are using an EyeBot controller for
driving the vehicle and reading its sensor data. Since this robot is to
be able to navigate in terrain, we use a number of orientation sensors
to avoid going up or down too steep inclines. The camera is mounted in
an active cardanic fashion using three servos for three axes.
One of the projects involving EyeTrack is an "intelligent remote control".
The robot drives under remote control and returns images and other sensor
data. However the robot adapts its speed automatically to environment conditions
and refuses to execute any commands that could result in the robot getting
stuck or falling over. This system could be very useful for a number of
rescue or bomb defusing scenarios.
EyeTrack
-
Modified model snow truck by
-
Tracked vehicle
-
Actuators:
-
1 driving motor for both tracks (digital amplifier)
-
1 brake servo (left/right) for steering
-
Camera controlled by servos in 3 axes
-
Inclusion of several sensors:
-
Digital compass
-
Inclinometer
-
Gyroscope
-
Infrared PSDs
-
Video MPG EyeTrack navigating in terrain (to follow)

EyeTrack from the side with EyeBot controller

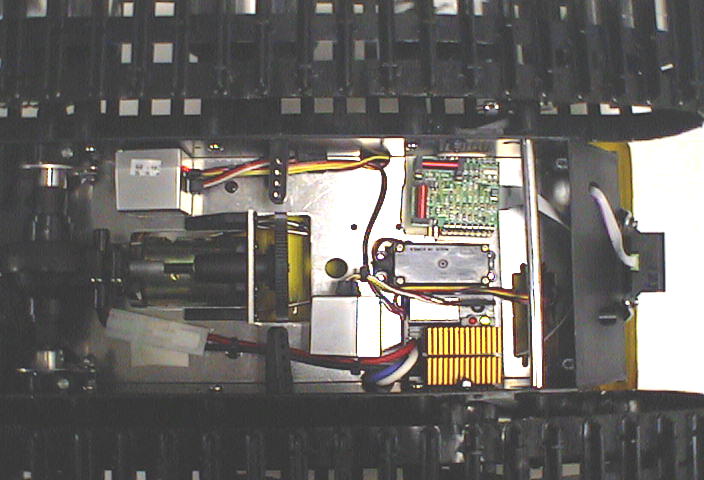
Sensors on bottom of EyeTrack (compass, gyroscope) and digital drive
unit
Vehicle Specific Settings
TPU 0 driving motor speed
--
TPU 6 braking servo
TPU 7-9 sensor inputs
TPU 10-12 camera control
Thomas Bräunl