Autonomous Airplanes
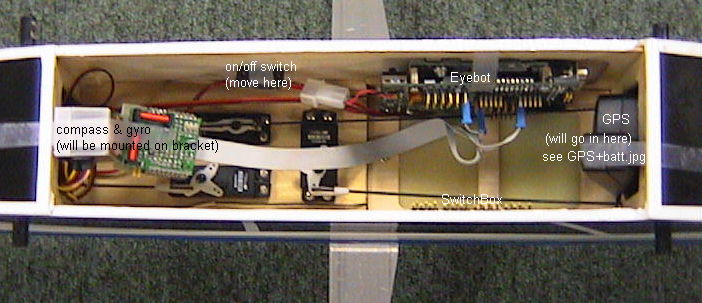
For our autonomous plane, we use an EyeBot controller together
with a number of sensors to autonomously navigate a plane. All plane actuators
are connected to a specially designed switch that allows to alternate (via
remote control) between a standard model plane remote control and autonomous
flying. That way, the critical actions take-off and landing can be performed
manually, while for the flight between it can be switched to automatic
mode. We rely on a GPS as most important sensor. A flight path can be specified
by entering GPS way points that the plane will approach successively.
For details see the book "Embedded Robotics".


Actuators used in the plane:
Switch box that transfers control of all plane servos either to remote
control or automatic control
Standard servos for roll / pitch / yaw / motor speed
Lights on the fuselage underside to indicate the plane's internal mode
(manual / automatic / error)
Sensors used in the plane:
-
GPS
-
Digital Compass
-
Gyroscope
FlyeBot Settings
TPU 2 Rudder
TPU 3 Elevator
TPU 4 Ailerons
TPU 5 Motor speed
-------
DO 4 Error indicator
-------
DI 0-7 compass
------
Serial1 User (PC) interface
Serial2 GPS interface
Thomas Bräunl