#include <Behavior.h>
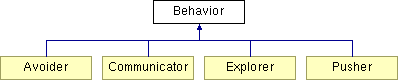
Inheritance diagram for Behavior:
Public Member Functions | |
| Behavior () | |
| void | setCommander (Commander &aCommander) |
Protected Attributes | |
| Drive * | drive |
| SIR * | sir |
| Commander * | myCommander |
| double | clusterRadius |
| double | myClusterPointDensity |
|
|
|
|
|
Used to set the commander for this behavior
|
|
|
Every Behavior knows the size of the cluster area |
|
|
Every Behavior gets access to the Drive to control robot movement |
|
|
This value is used to store the estimated cube density of the current cluster point |
|
|
Every Behavior knows its own commander (e.g. to tell the commander that the behavior wants to cede control or wants to sleep for some time) |
|
|
Every Behavior gets access to the high-level environment information provided by the SIR |
 1.3-rc3
1.3-rc3