#include <Behavior.h>
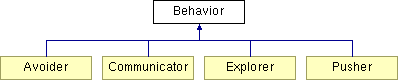
Inheritance diagram for Behavior:
Public Member Functions | |
| Behavior () | |
| void | setCommander (Commander &aCommander) |
| void | initialize (void) |
Protected Attributes | |
| Drive * | drive |
| SIR * | sir |
| Commander * | myCommander |
| double | clusterRadius |
| double | myClusterPointDensity |
|
|
|
|
|
The simulator does not allow the usage of RoBIOS functions in class constructors. Therefore we use public initialize methods for classes that need RoBIOS functions for their initializations. Reimplemented in Communicator. |
|
|
Used to set the commander for this behavior
|
|
|
Every Behavior knows the size of the cluster area |
|
|
Every Behavior gets access to the Drive to control robot movement |
|
|
This value is used to store the estimated cube density of the current cluster point |
|
|
Every Behavior knows its own commander (e.g. to tell the commander that the behavior wants to cede control or wants to sleep for some time) |
|
|
Every Behavior gets access to the high-level environment information provided by the SIR |
 1.3-rc3
1.3-rc3