Improv - Image Processing for Robot Vision
"See it Live at the Improv!"
Description
Improv is a tool for basic real time image processing at
low resolution, e.g. suitable for mobile robots.
It has been developed for PCs with the Linux operating
system and runs under X Windows
Improv works with a number of inexpensive low-resolution
digital cameras (no framegrabber required).
Version 5.1 now on ftp server!
Features
Improv 5 has been completely re-written, and now contains the
following features:
- Modular design, allowing for easy integration of new functionality.
- Image processing operations are contained within plugins, compiled
as statically
linked files (.so), which can be loaded and unloaded
at run time.
- Improved support for still image sequences.
- An abstract Camera class, simplifying the creation of new camera drivers.
- A completely customisable interface, allowing for complex image processing sequences.
- Written using the QT Windowing library.
- Portable autoconf/automake build scripts.
Improv also includes support for the following cameras:
- Quickcam grayscale camera (parallel port) [no longer sold]
Make sure to set the protocol of your parallel port correctly
(boot-up setting to either ECP or EPP should work).
- Quickcam Color V2 camera (parallel port) [no longer sold]
Sorry, none of the newer QuickCams work - Connectix/Logitech
refuses to disclose the low-level interface.
- Various web cameras
with cpia driver, e.g. ZoomCam
- Video 4 Linux cameras
- and preliminary support for
Video 4 Linux 2 cameras.
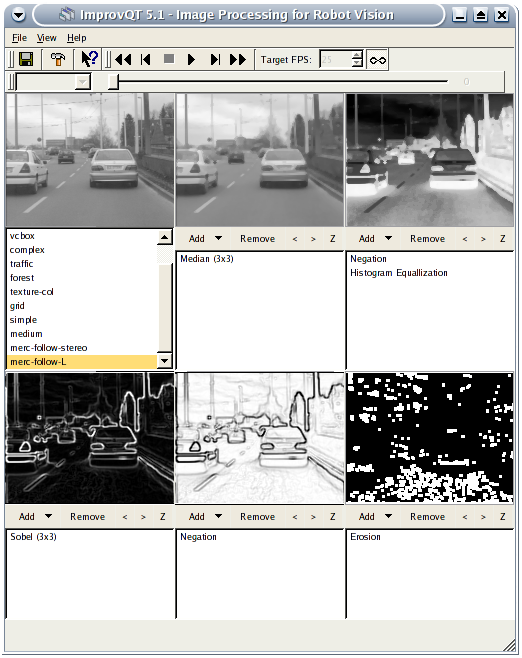
Improv displays the source image (from either a still image
or a live camera) in the first window, while subsequent image
operations can be applied to this image in five more windows. For
each sub-window, a sequence of image processing routines may be
specified.
Software
Improv has been implemented by Michael Rudolph,
Thomas Bräunl, Elliot Nichols, Gerrit Heitsch, Uli Mezger,
Glen Horlin and Leon Koch
under direction of Thomas Bräunl.
Thomas Bräunl